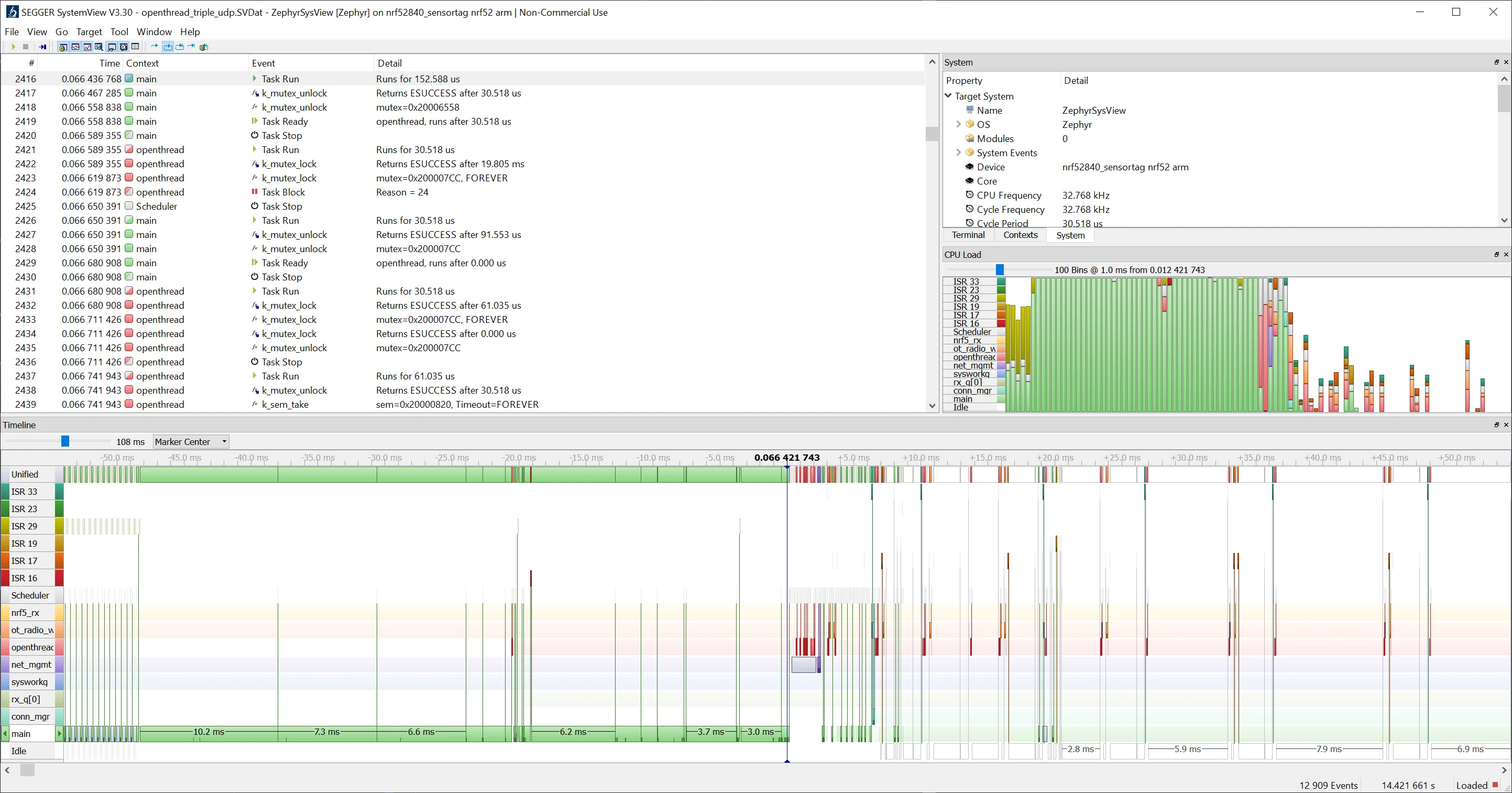
Trace with with SystemView
- Segger SystemView : Real time OS Tracing
- SystemView user manual : Getting started, API reference,...
Steps :
- Install SystemView
- compile the target with the overlay
overlay-tracing.confand flash, reset - SystemView Recorder configuration
J-Link,NRF52840_XXAA,SWD,4000 KHz - SystemView
Start RecordingtheStop Recording - if SystemViewer keeps crashing try closing the window
CPU load
content of
overlay-tracing.conf#Tracing
CONFIG_TRACING=y
CONFIG_SEGGER_SYSTEMVIEW=y
CONFIG_THREAD_NAME=y
CONFIG_SEGGER_SYSTEMVIEW_BOOT_ENABLE=y
# careful adjustment as long as there is enough SRAM use it for tracing 128 KB
CONFIG_SEGGER_SYSVIEW_RTT_BUFFER_SIZE=131072 Hints
- power on tracing : In case a power-on startup has to be traced, it is necessary to increase the target local RTT buffer size, because it keeps bauffering the tracing until the user has the time to start SystemView recording. For that, it is important to check how much free memory the system has, and then adjust the RTT buffer
- ISR ID Identification : the function
sysview_get_interrupt()is usingSCB->ICSR VECTACTIVE - not the same as
IRQn_Typedefined inmodules\hal\nordic\nrfx\mdk\nrf52840.h
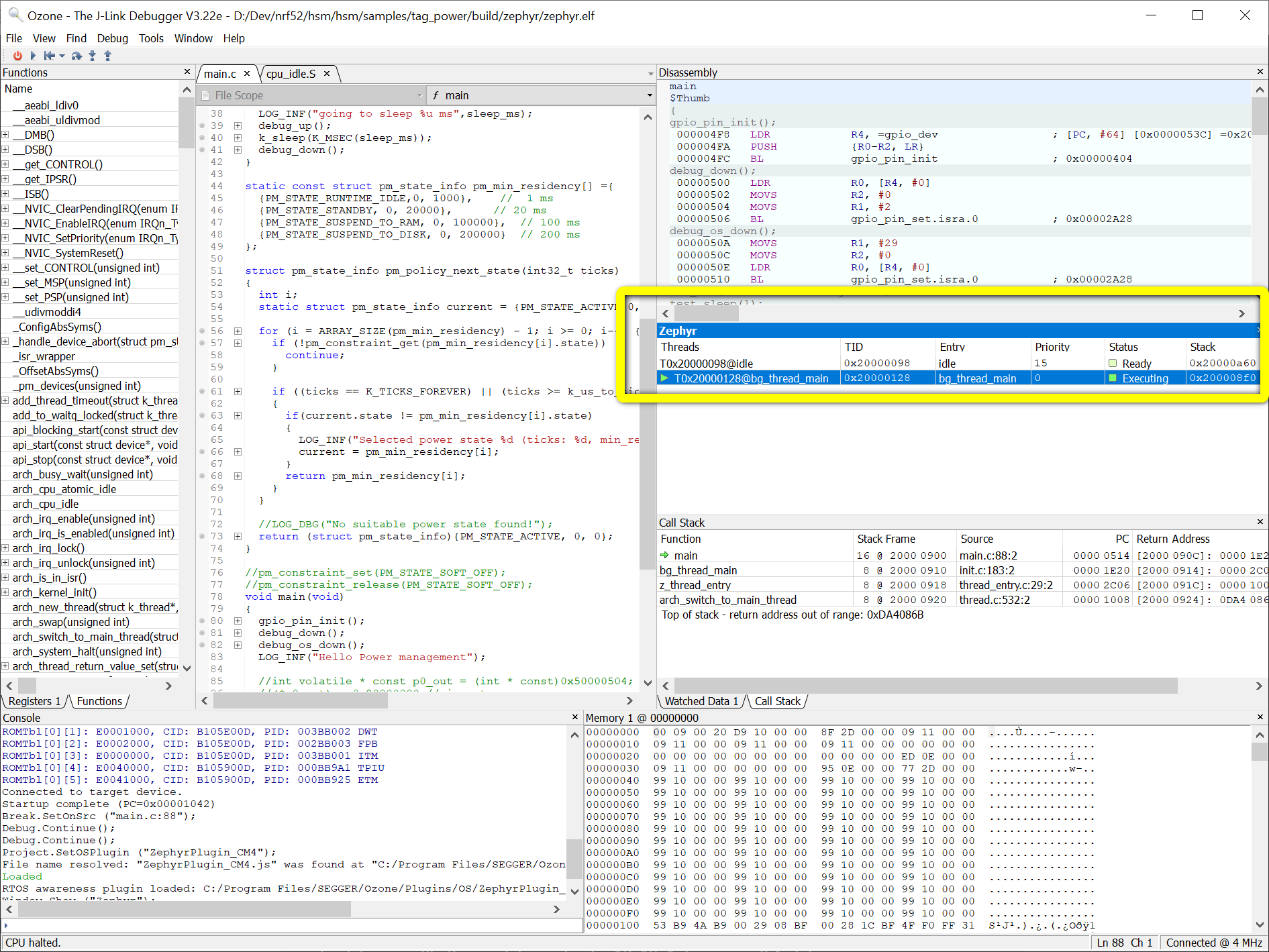
Debug with OZone
- Ozone : performance analyzer
- RTOS Awareness : debug an RTOS
Steps :
- make sure to use Ozone version 3.22d or higher
- in the new project wizard, make sure an svd file is selected e.g. from the Zephyr projecz
modules\hal\nordic\nrfx\mdk\nrf52840.svd - For a Segger j-link edu, select the Target interface SWD
- compile with
CONFIG_DEBUG_THREAD_INFO=y - select the elf file of the Zephyr build
hsm/hsm/samples/tag_power/build/zephyr/zephyr.elf - in the bottom left console type
Project.SetOSPlugin("ZephyrPlugin_CM4"). That will load the Zephyr RTOS awareness plugin - you should now be able to access the Zephyr debug window from the menu
Viewthen in theAdvancedsectionZephyr
Serial Debug
- Log :
CONFIG_LOGcreates aloggingthread and enablesLOG_INF(),LOG_DBG(),... functions- needs a backend e.g.
CONFIG_LOG_BACKEND_RTT,CONFIG_LOG_BACKEND_UART
- Shell :
CONFIG_SHELLcreates ashell_xxxthread that enables an interactive command line e.g.rtt:~$ kernel threads- needs a backend e.g.
CONFIG_SHELL_BACKEND_RTT,CONFIG_SHELL_BACKEND_SERIAL
shell command examples
>help
>kernel threads
>kernel stacks
>log enable dbg main
Windows Install
The details are in the link above, the summary of the step for installing on windows are
- Installing
choco - Installing
westdependencies withchoco - installing
westwithpip - the retrieving the repo and building are performed through
west - The compiler toolchain as multiple options
- Zephyr own SDK, not available on windows
- GNU ARM Embedded : to be installed on a path without spaces
e.g. for a path
"D:\tools\gnu_arm_embedded\9_2020-q2-update\bin\arm-none-eabi-gcc.exe" GNUARMEMB_TOOLCHAIN_PATH shall be set to D:\tools\gnu_arm_embedded\9_2020-q2-update Linux Install
- installing Zephyr with its own compiler toolchain
Zephyr SDK - install nRF Command Line tools
tar -xf nRFCommandLineTools10121Linuxamd64.tar.gz
sudo dpkg -i nRF-Command-Line-Tools_10_12_1_Linux-amd64.deb Build and Flash
Testing blinky sample
add
CONFIG_BOARD_HAS_NRF5_BOOTLOADER=n to prj.conftested version 2.5.99
cd ~/zephyrproject/zephyr/samples/basic/blinky
west build -p auto -b nrf52840dongle_nrf52840 -- -DCONF_FILE=prj.conf
west flash
nrfjprog -f nrf52 --reset RTT config
required configuration to have logs running over the segger j-link RTT (log through the same SWD interface used for programming)
prj.conf
CONFIG_GPIO=y
CONFIG_SERIAL=n
CONFIG_BOARD_HAS_NRF5_BOOTLOADER=n
# Logging
CONFIG_LOG=y
CONFIG_LOG_BACKEND_RTT=y
CONFIG_LOG_BACKEND_UART=n
CONFIG_BOOT_BANNER=y
CONFIG_USE_SEGGER_RTT=y
CONFIG_CONSOLE=y
CONFIG_UART_CONSOLE=n
CONFIG_RTT_CONSOLE=ymain.c
#include <zephyr.h>
#include <logging/log.h>
LOG_MODULE_REGISTER(main, LOG_LEVEL_INF);
void main(void)
{
LOG_INF("Starting");
int count = 0;
while (1) {
LOG_INF("loop: %d",count++);
}
}